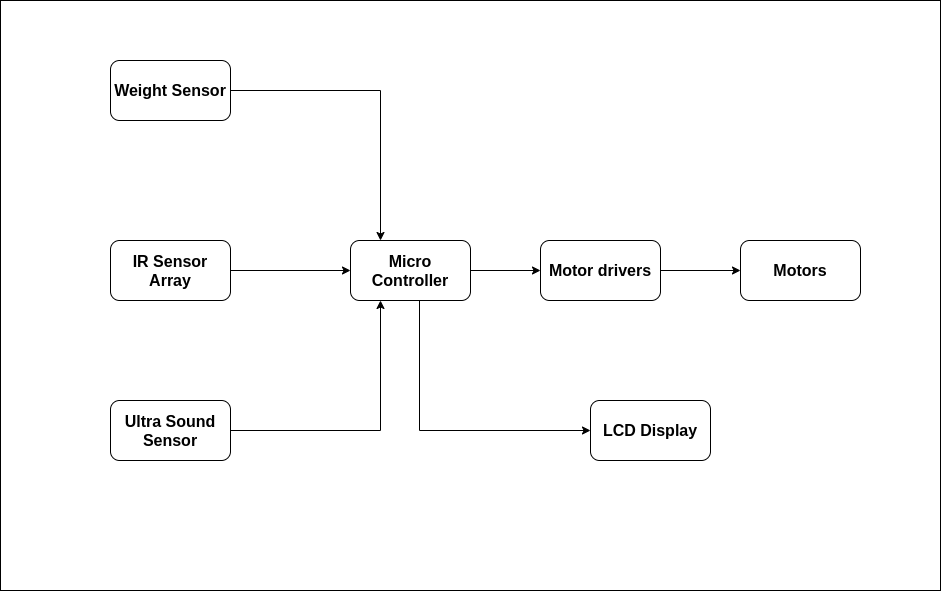
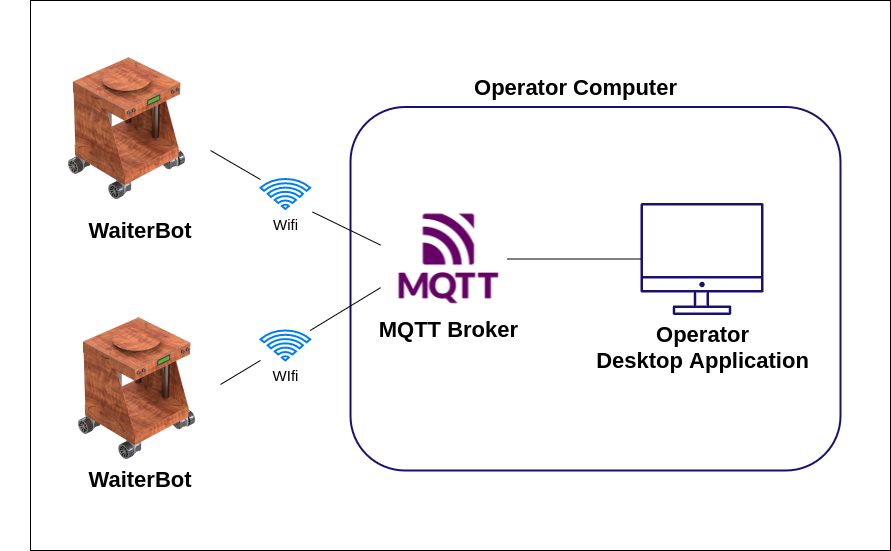
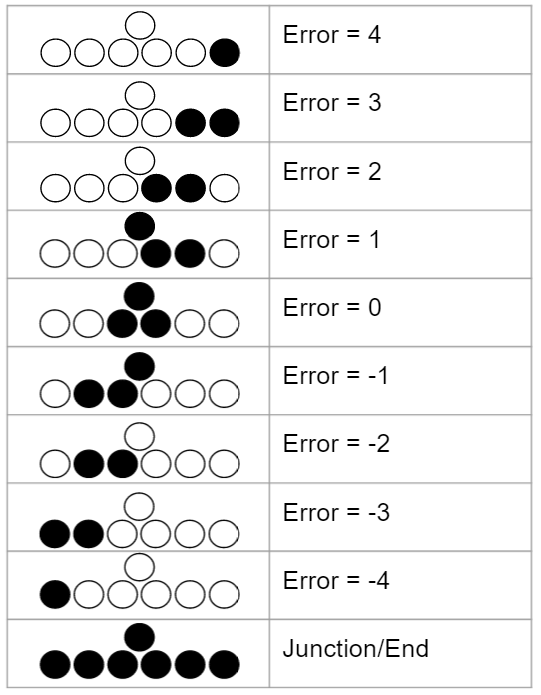
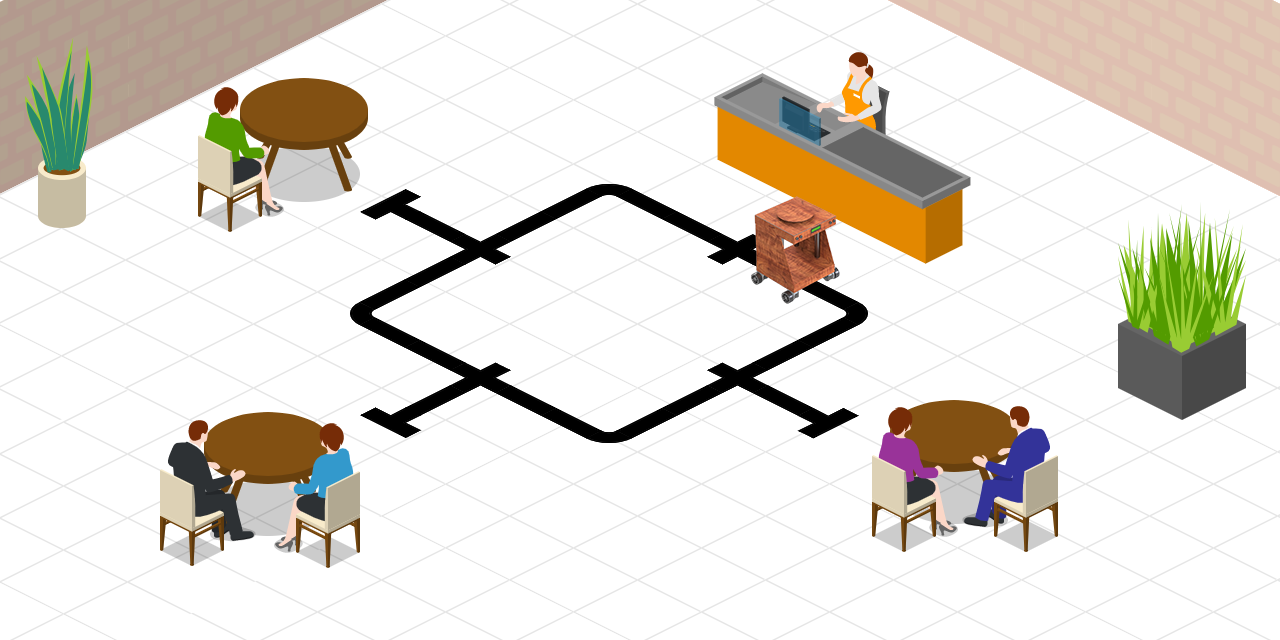
WaiterBot is the main hardware component in our system. When a WaiterBot is deployed, the control unit will send a message to the WaiterBot consisting of the number of junctions and the turning direction. WaiterBot will reach the destination table by a line following mechanism and decides the correct path to the table by keeping track of the junctions in the path.
When the WaiterBot reaches the destination table, it will wait there untill the food items are taken away from its tray. Robot will ensure that all the food items are taken away from the tray by measuring the weight. When the delivery is complete the robot will return to the station and the robot can be deployed for another table.
If the robot is interfered by any obstrucle, the robot will stop its movement and inform the control unit and also if the food items on the tray are taken away from the tray before reaching the destination table, the robot will inform the control unit that the food items were taken away before reaching the destination table.
WaiterBot Features
- WaiterBot is programmed in a way that the table layout and the path can be changed by the shop owner.
- Alerts on interupting the delivery and on taking the items off the tray before delivery.