📡
Sensor Acquisition
JSN-SR04T · ESP32 · 200ms · EMA filter
⚡
Send-on-Delta
Continuous → sparse spikes · θ=0.5 · 92.3% sparsity
🧠
EventDrivenSNN
LIF neurons · 3 FC layers · W=15 windows
🧭
Classification
Safe / Danger · 3.5 Hz nav commands
📍
3D Positioning
Tether geometry · IMU · CORS/RTK GPS
🔊
Sensor Acquisition Firmware
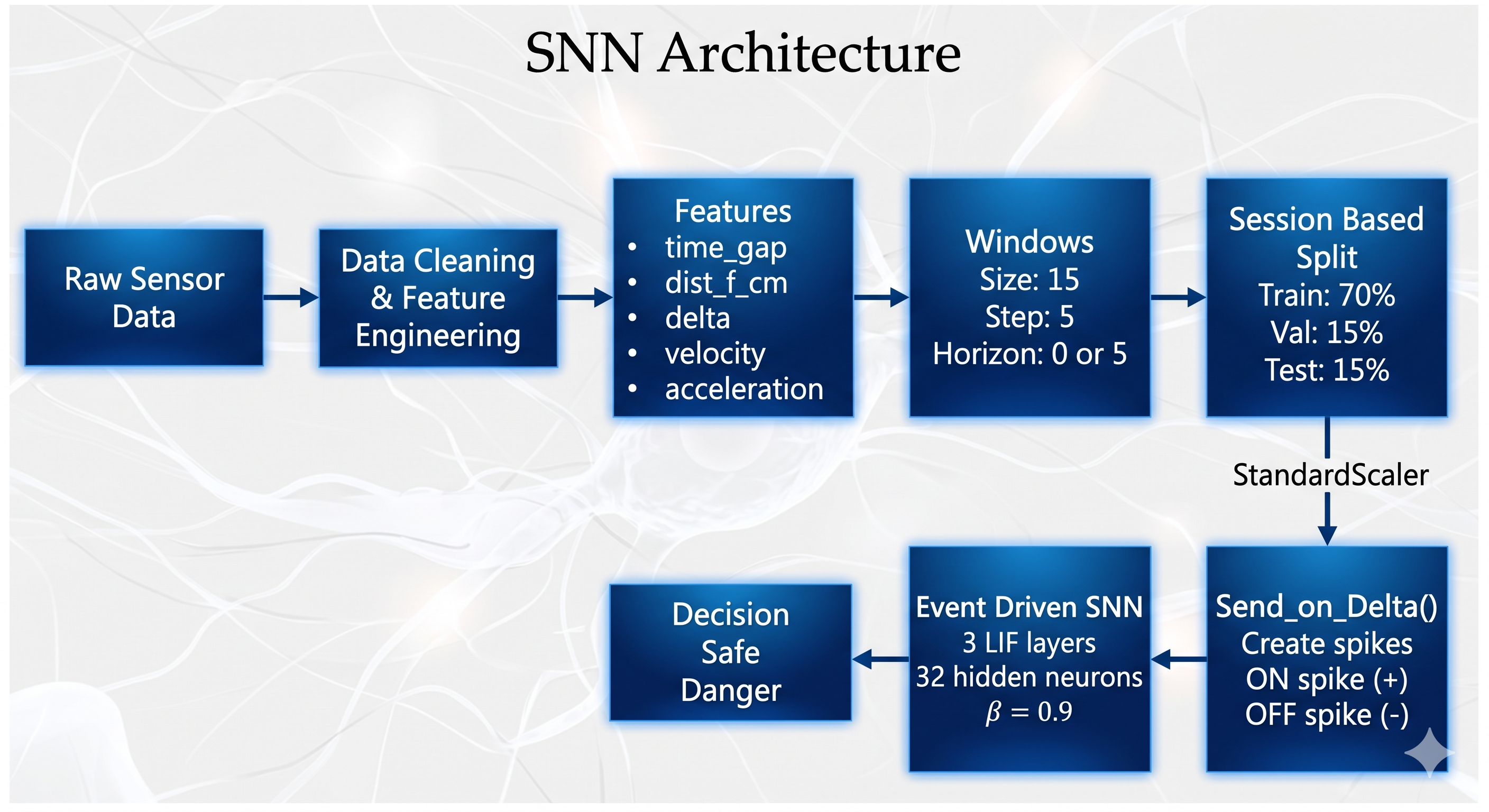
ESP32 drives four JSN-SR04T waterproof ultrasonic sensors using sequential triggering to prevent acoustic cross-talk. Each sensor fires seven pings at 25 ms intervals; median echo duration converted to distance at 0.148 cm/µs. Drop-rejection filter and EMA smoothing (α=0.25) applied. Adaptive per-sensor baseline learned from 25 stability-gated samples within a 12 cm band.
⚡
Send-on-Delta Encoding
Core neuromorphic contribution: converts feature windows into binary spike trains. A positive (ON) spike emitted when a feature value change exceeds threshold θ; a negative (OFF) spike when it falls below −θ. With θ=0.5 and five input features, channel dimension doubles from 5 to 10, yielding 91.5% silent inputs on real AUV data.
🧠
EventDrivenSNN Architecture
Three fully-connected layers interleaved with Leaky Integrate-and-Fire neurons: 10 → FC(10→32) → LIF₁ → FC(32→32) → LIF₂ → FC(32→2) → LIF₃. β=0.9 decay, U_thr=1. Only 1,474 trainable parameters — 9× fewer than equivalent two-layer LSTM. Trained with fast sigmoid surrogate gradient.
📍
Tether-Based Positioning
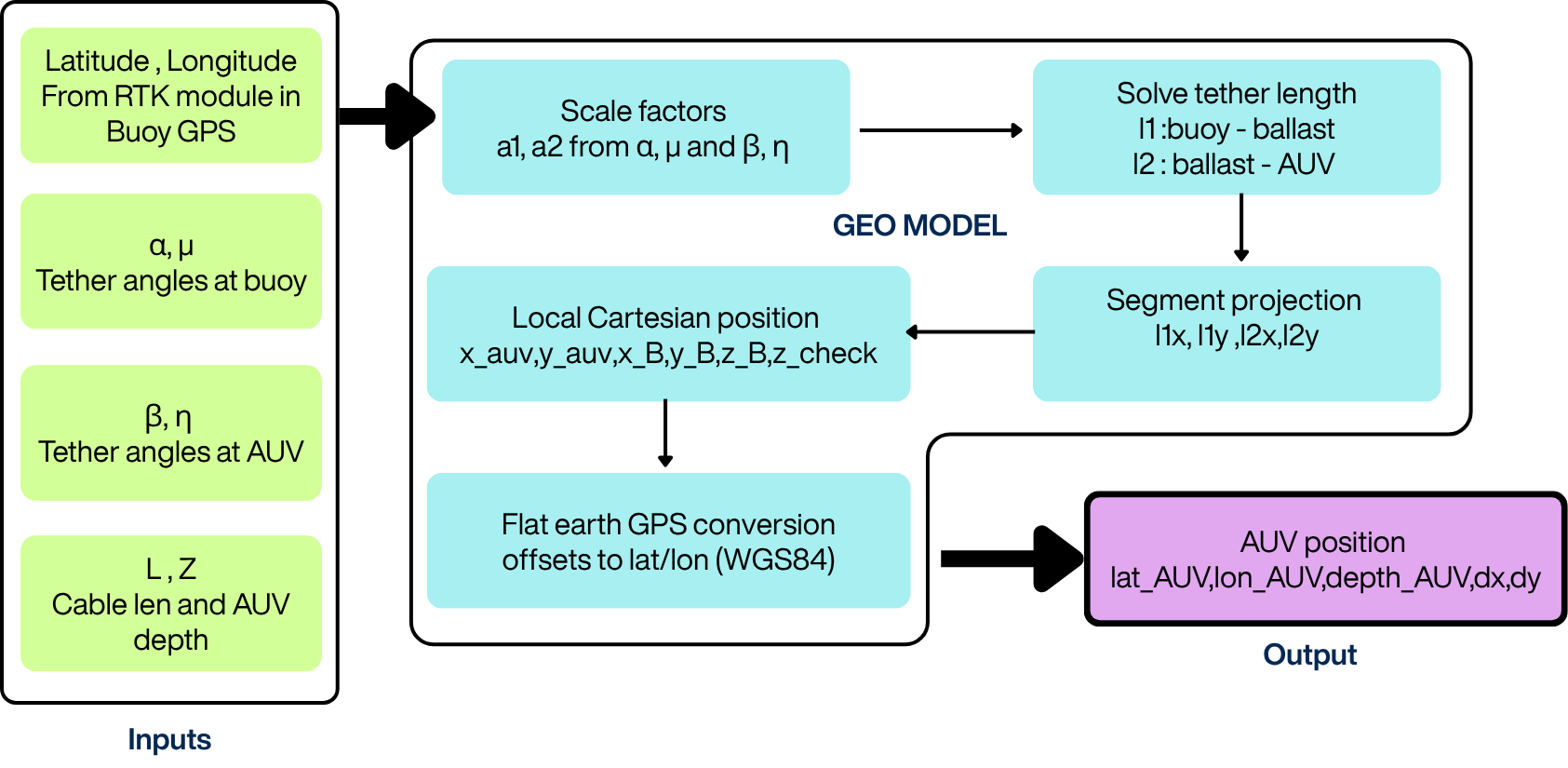
Implements Viel et al. model: tether assumed straight two-segment geometry maintained by sliding ballast. Given total cable length L, AUV depth z from pressure sensor, and four tether angles from two IMUs, segment lengths and AUV Cartesian offset computed analytically. CORS/RTK GPS converts local offset to WGS84 absolute coordinates.
📊
Feature Engineering
Five temporal features: (1) time_gap — sensor timing regularity; (2) dist_f_cm — EMA-filtered distance; (3) delta — deviation from adaptive baseline; (4) velocity — Δd_f/Δt, approach rate; (5) acceleration — Δv/Δt. Sliding windows W=15 with stride S=5. Labels assigned at prediction horizon H=0.
⚖️
Training Configuration
Session-level 70/15/15 train/validation/test split. Class-balanced cross-entropy loss (weights: 0.61 safe, 2.79 danger). Adam optimiser, η=10⁻³, 20 epochs, batch size 64. Compared against RF, LSTM, GRU, 1D-CNN, and MLP baselines under identical splits, scalers, and class weights.